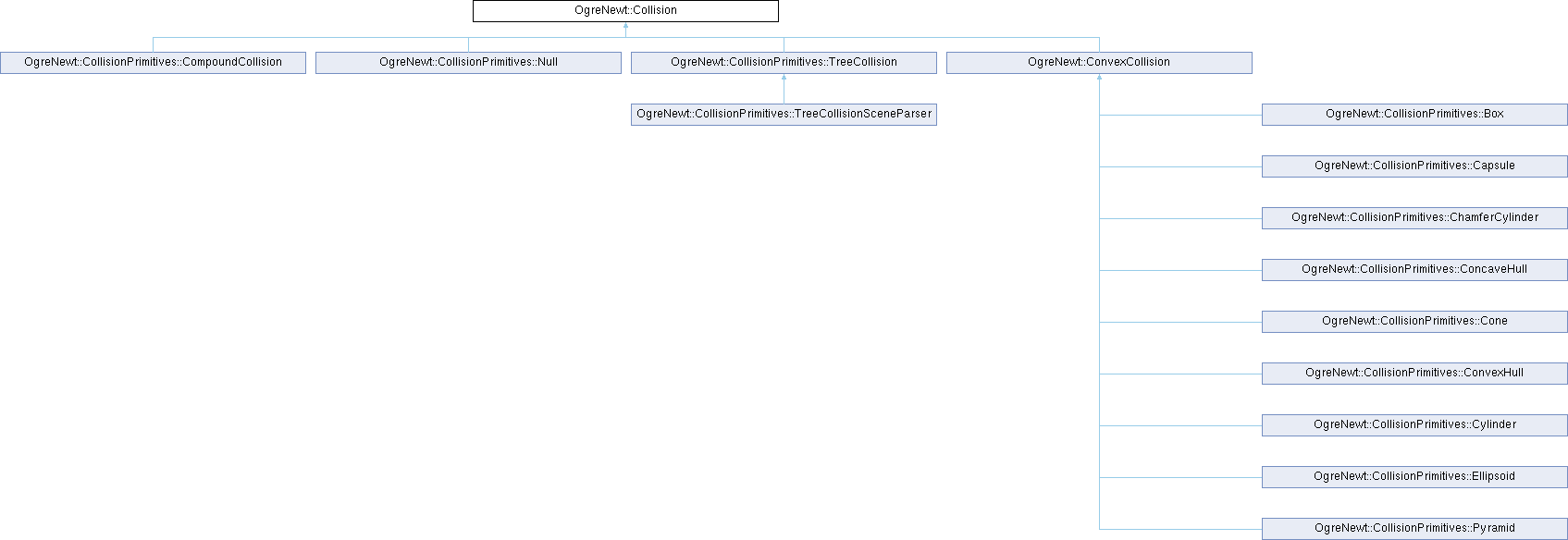
represents a shape for collision detection More...
#include <OgreNewt_Collision.h>
Public Member Functions | |
| Collision (const World *world) | |
| constructor | |
| Collision (const Collision &shape) | |
| constructor | |
| Collision (const NewtonCollision *collision, const World *world) | |
| constructor | |
| virtual | ~Collision () |
| destructor | |
| NewtonCollision *const | getNewtonCollision () const |
| retrieve the Newton pointer | |
| const World * | getWorld () const |
| Ogre::AxisAlignedBox | getAABB (const Ogre::Quaternion &orient=Ogre::Quaternion::IDENTITY, const Ogre::Vector3 &pos=Ogre::Vector3::ZERO) const |
| CollisionPrimitiveType | getCollisionPrimitiveType () const |
| Returns the Collisiontype for this Collision. | |
| NewtonCollisionInfoRecord * | getInfo () |
| Returns collision info record for this collision. | |
Static Public Member Functions | |
| static CollisionPrimitiveType | getCollisionPrimitiveType (const NewtonCollision *col) |
| Returns the Collisiontype for the given Newton-Collision. | |
| static NewtonCollisionInfoRecord * | getInfo (const NewtonCollision *col) |
| Returns collision info record for given collision. | |
Protected Attributes | |
| NewtonCollision * | m_col |
| const World * | m_world |
Friends | |
| class | OgreNewt::CollisionSerializer |
| friend functions for the Serializer | |
Detailed Description
represents a shape for collision detection
Definition at line 50 of file OgreNewt_Collision.h.
Constructor & Destructor Documentation
◆ Collision() [1/3]
| OgreNewt::Collision::Collision | ( | const World * | world | ) |
constructor
Definition at line 12 of file OgreNewt_Collision.cpp.
◆ Collision() [2/3]
| OgreNewt::Collision::Collision | ( | const Collision & | shape | ) |
constructor
Definition at line 16 of file OgreNewt_Collision.cpp.
◆ Collision() [3/3]
| OgreNewt::Collision::Collision | ( | const NewtonCollision * | collision, |
| const World * | world | ||
| ) |
constructor
Definition at line 20 of file OgreNewt_Collision.cpp.
◆ ~Collision()
|
virtual |
destructor
Definition at line 24 of file OgreNewt_Collision.cpp.
Member Function Documentation
◆ getAABB()
| Ogre::AxisAlignedBox OgreNewt::Collision::getAABB | ( | const Ogre::Quaternion & | orient = Ogre::Quaternion::IDENTITY, |
| const Ogre::Vector3 & | pos = Ogre::Vector3::ZERO |
||
| ) | const |
you can set different IDs for each piece in a compound collision object, and then use these IDs in a collision callback to determine which part is currently colliding. / void setUserID( unsigned id ) const { NewtonCollisionSetUserID( m_col, id); }
! get user ID, for collision callback identification unsigned getUserID() const { return NewtonCollisionGetUserID(m_col); }
! get the Axis-Aligned Bounding Box for this collision shape. /*!
- Warning
- The returned AABB can be too large! If you need an AABB that fits exactly use the OgreNewt::CollisionTools::CalculateFittingAABB function
Definition at line 32 of file OgreNewt_Collision.cpp.
◆ getCollisionPrimitiveType() [1/2]
|
inline |
Returns the Collisiontype for this Collision.
Definition at line 95 of file OgreNewt_Collision.h.
◆ getCollisionPrimitiveType() [2/2]
|
static |
Returns the Collisiontype for the given Newton-Collision.
Definition at line 50 of file OgreNewt_Collision.cpp.
◆ getInfo() [1/2]
|
inline |
Returns collision info record for this collision.
Definition at line 101 of file OgreNewt_Collision.h.
◆ getInfo() [2/2]
|
static |
Returns collision info record for given collision.
Definition at line 59 of file OgreNewt_Collision.cpp.
◆ getNewtonCollision()
|
inline |
retrieve the Newton pointer
retrieves the pointer to the NewtonCollision object.
Definition at line 70 of file OgreNewt_Collision.h.
◆ getWorld()
|
inline |
Returns the Newton world this collision belongs to.
Definition at line 75 of file OgreNewt_Collision.h.
Friends And Related Symbol Documentation
◆ OgreNewt::CollisionSerializer
|
friend |
friend functions for the Serializer
Definition at line 107 of file OgreNewt_Collision.h.
Member Data Documentation
◆ m_col
|
protected |
Definition at line 112 of file OgreNewt_Collision.h.
◆ m_world
|
protected |
Definition at line 113 of file OgreNewt_Collision.h.
The documentation for this class was generated from the following files:
- include/External/ogrenewt/OgreNewt_Collision.h
- src/External/ogrenewt/OgreNewt_Collision.cpp