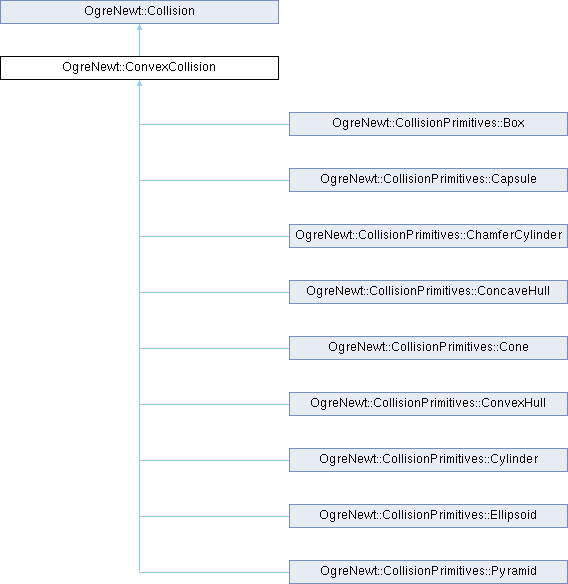
represents a collision shape that is explicitly convex. More...
#include <OgreNewt_Collision.h>
Public Member Functions | |
| ConvexCollision (const World *world) | |
| constructor | |
| ConvexCollision (const Collision &convexShape) | |
| constructor | |
| ConvexCollision (const ConvexCollision &convexShape) | |
| constructor | |
| ~ConvexCollision () | |
| destructor | |
| Ogre::Real | calculateVolume () const |
| calculate the volume of the collision shape, useful for buoyancy calculations. | |
| void | calculateInertialMatrix (Ogre::Vector3 &inertia, Ogre::Vector3 &offset) const |
| calculate the moment of inertia for this collision primitive, along with the theoretical center-of-mass for this shape. | |
 Public Member Functions inherited from OgreNewt::Collision Public Member Functions inherited from OgreNewt::Collision | |
| Collision (const World *world) | |
| constructor | |
| Collision (const Collision &shape) | |
| constructor | |
| Collision (const NewtonCollision *collision, const World *world) | |
| constructor | |
| virtual | ~Collision () |
| destructor | |
| NewtonCollision *const | getNewtonCollision () const |
| retrieve the Newton pointer | |
| const World * | getWorld () const |
| Ogre::AxisAlignedBox | getAABB (const Ogre::Quaternion &orient=Ogre::Quaternion::IDENTITY, const Ogre::Vector3 &pos=Ogre::Vector3::ZERO) const |
| CollisionPrimitiveType | getCollisionPrimitiveType () const |
| Returns the Collisiontype for this Collision. | |
| NewtonCollisionInfoRecord * | getInfo () |
| Returns collision info record for this collision. | |
Additional Inherited Members | |
| Static Public Member Functions inherited from OgreNewt::Collision | |
| static CollisionPrimitiveType | getCollisionPrimitiveType (const NewtonCollision *col) |
| Returns the Collisiontype for the given Newton-Collision. | |
| static NewtonCollisionInfoRecord * | getInfo (const NewtonCollision *col) |
| Returns collision info record for given collision. | |
| Protected Attributes inherited from OgreNewt::Collision | |
| NewtonCollision * | m_col |
| const World * | m_world |
Detailed Description
represents a collision shape that is explicitly convex.
Definition at line 120 of file OgreNewt_Collision.h.
Constructor & Destructor Documentation
◆ ConvexCollision() [1/3]
| OgreNewt::ConvexCollision::ConvexCollision | ( | const World * | world | ) |
constructor
Definition at line 68 of file OgreNewt_Collision.cpp.
◆ ConvexCollision() [2/3]
| OgreNewt::ConvexCollision::ConvexCollision | ( | const Collision & | convexShape | ) |
constructor
Definition at line 72 of file OgreNewt_Collision.cpp.
◆ ConvexCollision() [3/3]
| OgreNewt::ConvexCollision::ConvexCollision | ( | const ConvexCollision & | convexShape | ) |
constructor
Definition at line 76 of file OgreNewt_Collision.cpp.
◆ ~ConvexCollision()
| OgreNewt::ConvexCollision::~ConvexCollision | ( | ) |
destructor
Definition at line 80 of file OgreNewt_Collision.cpp.
Member Function Documentation
◆ calculateInertialMatrix()
|
inline |
calculate the moment of inertia for this collision primitive, along with the theoretical center-of-mass for this shape.
Definition at line 139 of file OgreNewt_Collision.h.
◆ calculateVolume()
|
inline |
calculate the volume of the collision shape, useful for buoyancy calculations.
Definition at line 136 of file OgreNewt_Collision.h.
The documentation for this class was generated from the following files:
- include/External/ogrenewt/OgreNewt_Collision.h
- src/External/ogrenewt/OgreNewt_Collision.cpp